Submarine
Control of UCAT(Submarine Robot)
The course handled basics of robotics with an application.
PID Control
PID(Proportional - Integral - Derivative)
\(u(t) = K_p e(t) + K_i \int e(t) dt + K_d \frac{de(t)}{dt}\)
\(u(t)\): Input of control, \(e(t)\): Error between current and desired value(current - desired)
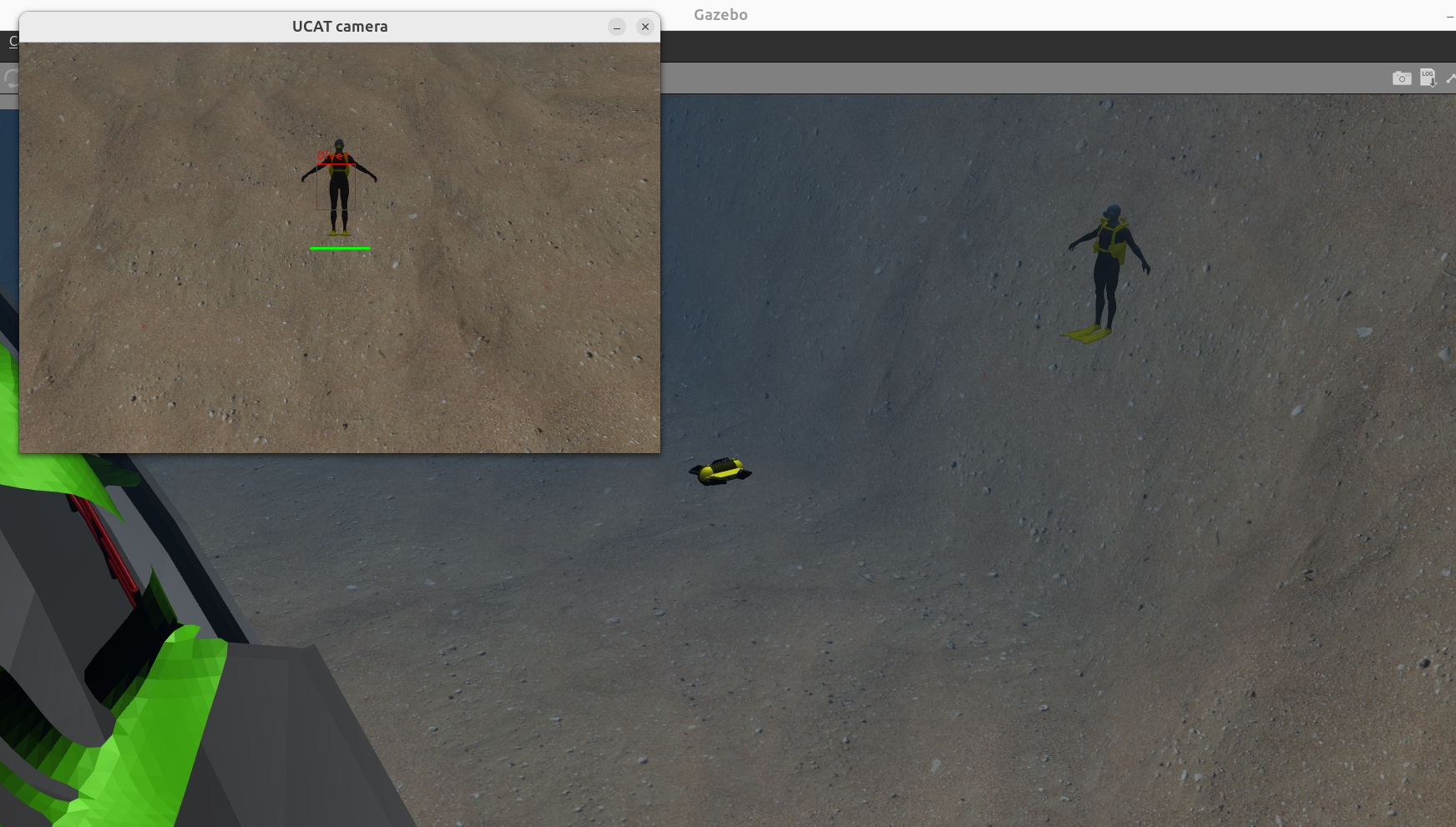
Using PID control, I control a depth of a submarine robot.
Tracking an object
Using yolo, we can recognize a diver in a camera image.
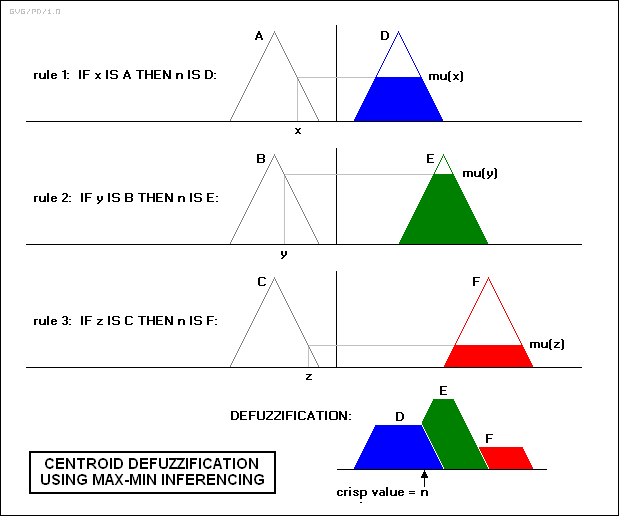
Fuzzy Logic Control
Kalman Filter

Implementing the theory above, sensor fusion between vision and sonar to track the diver.
Leave a Comment
Your email address will not be published. Required fields are marked *