Manipulation
Both courses dealt with kinematics and dynamics of a robot and control theory.
Advanced Robot Control and Learning(ARCL)
ARCL handled more theoretical parts with a project at the end.
Project(ARCL) - Robothon
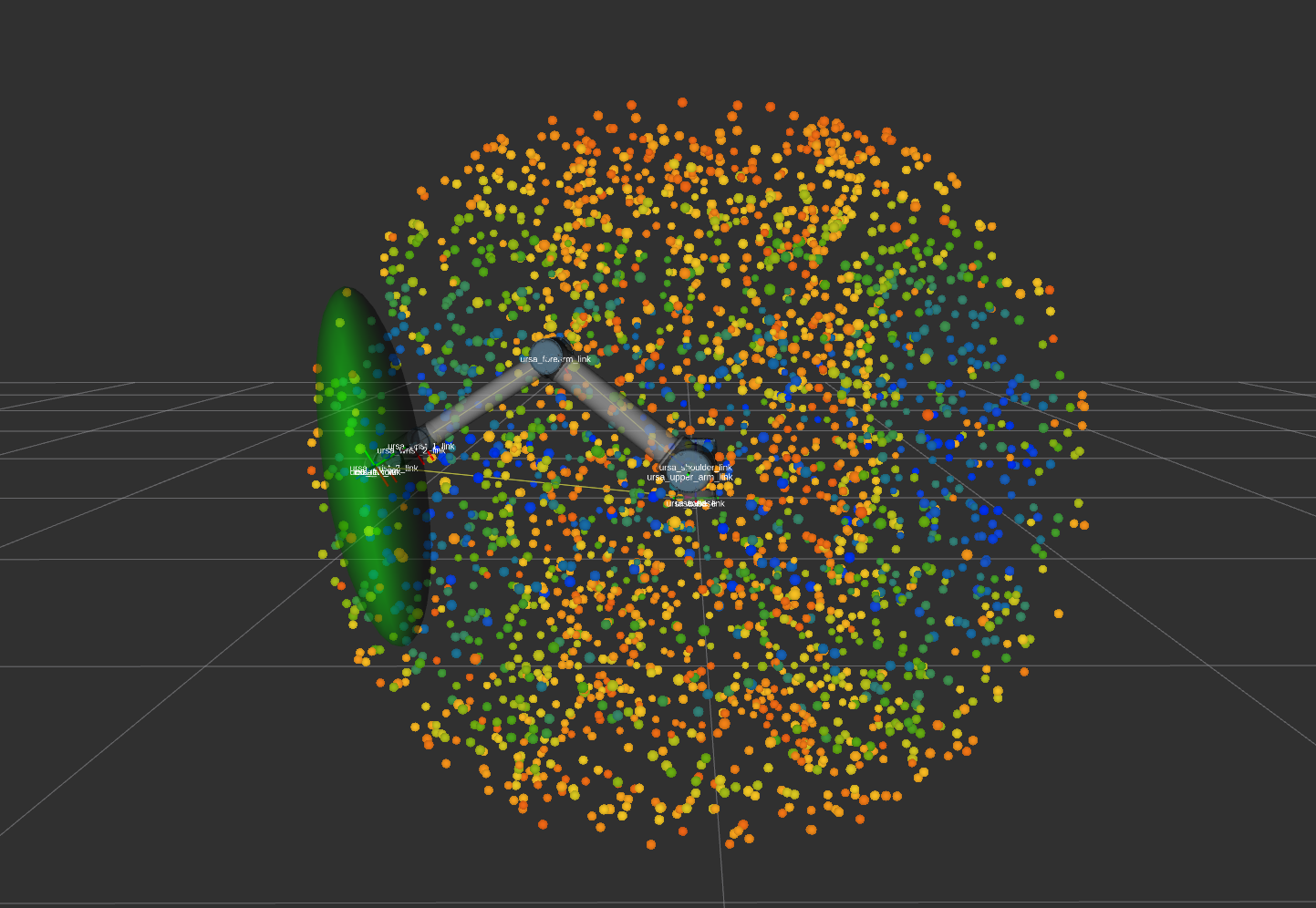
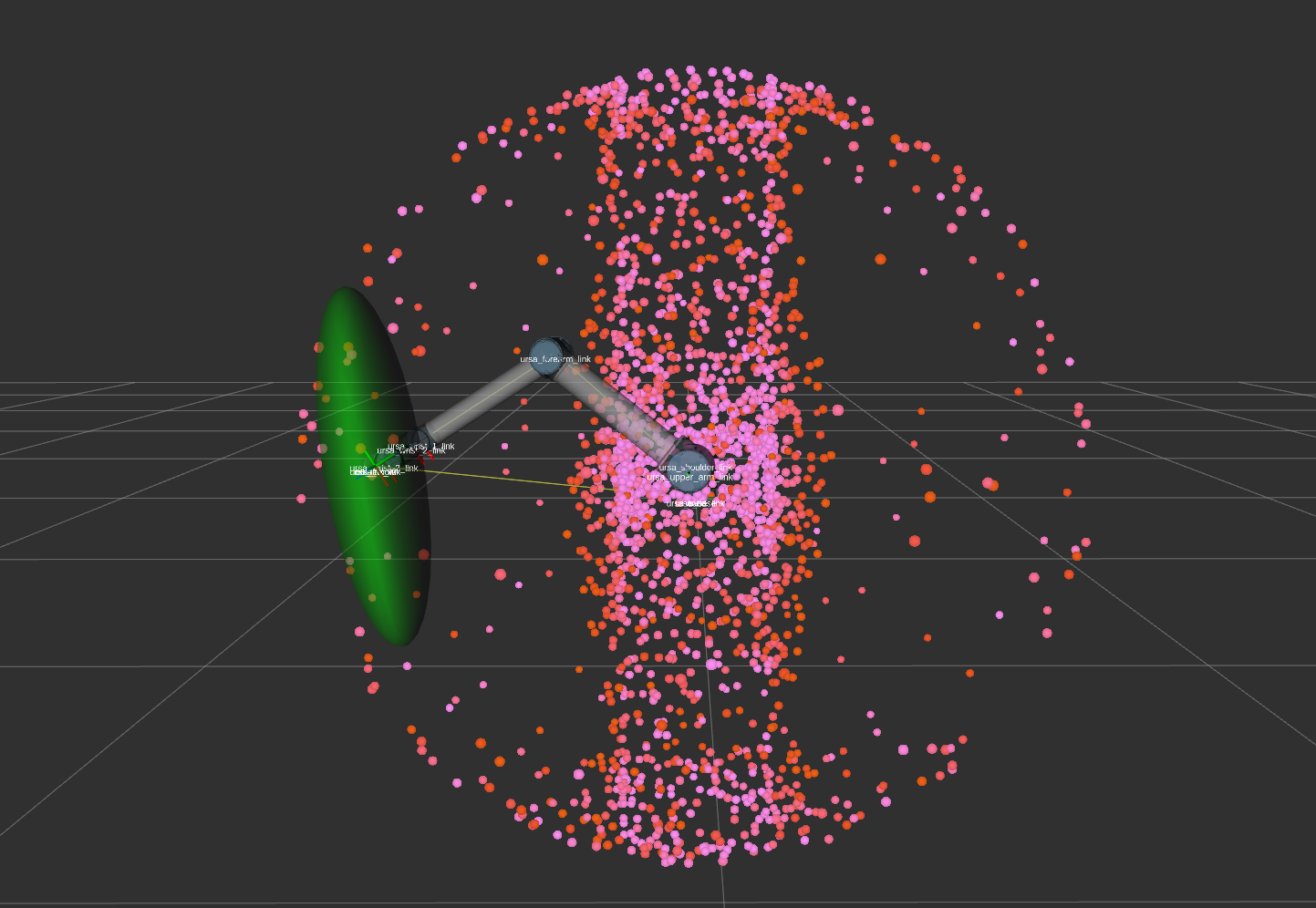
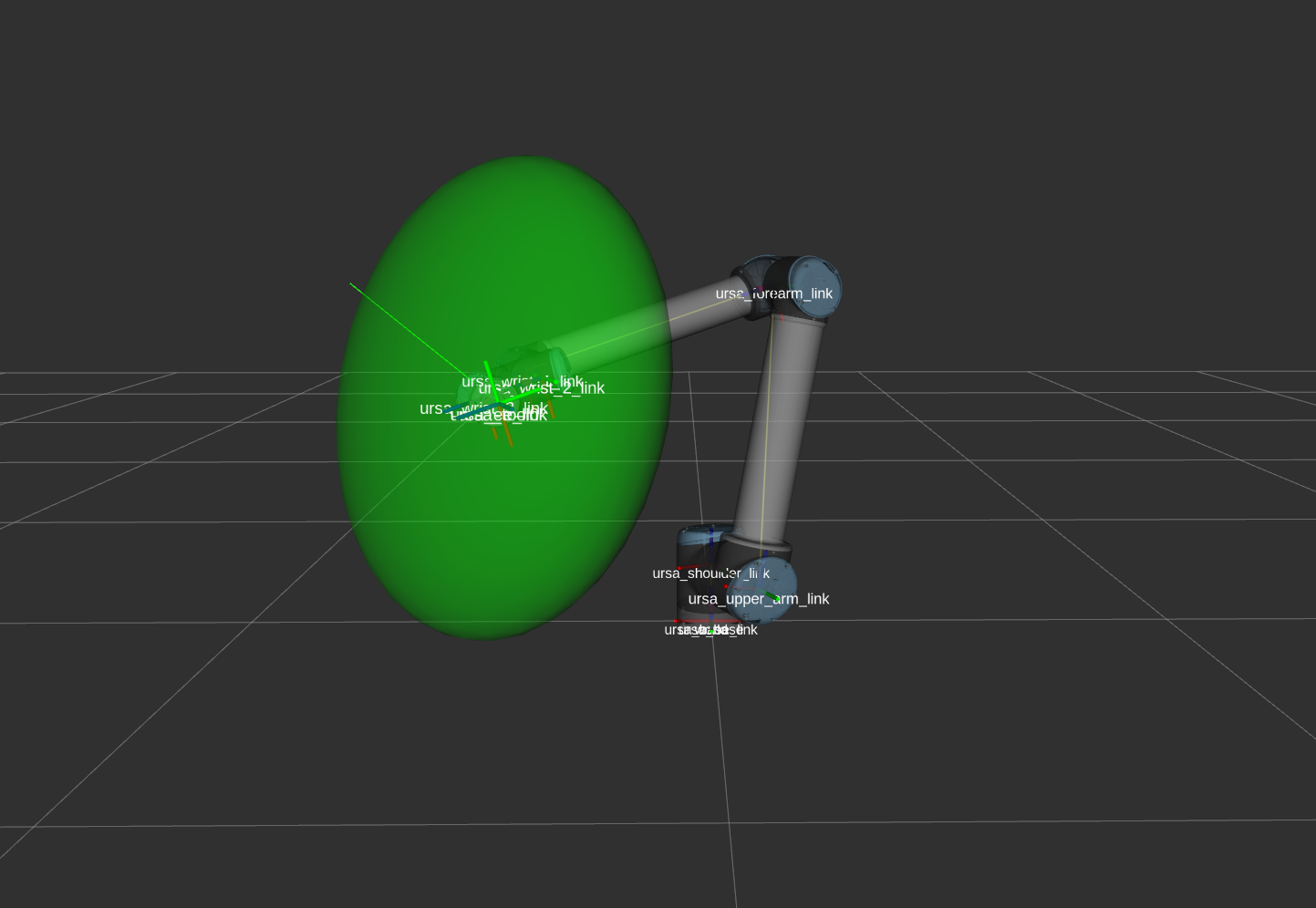
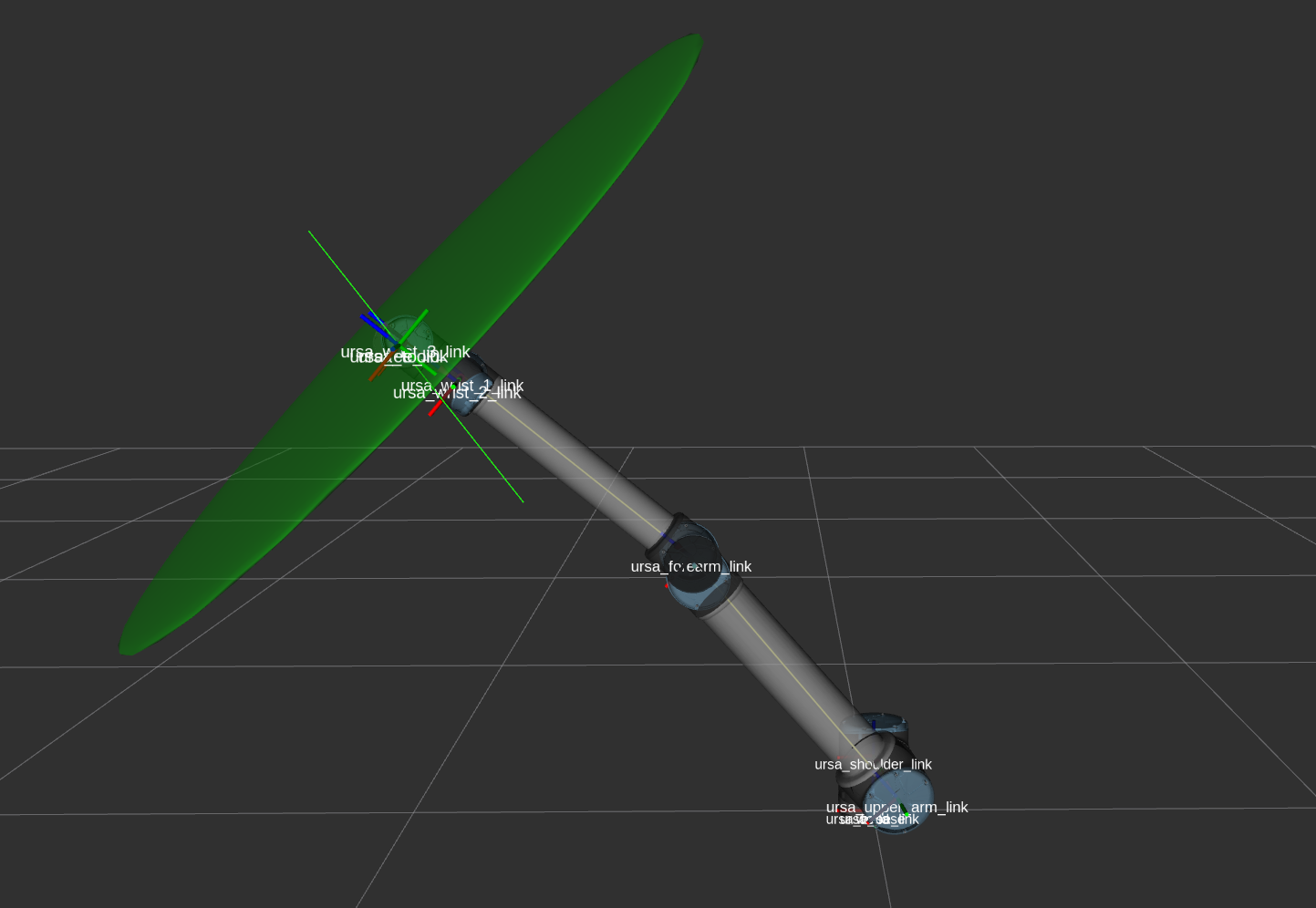
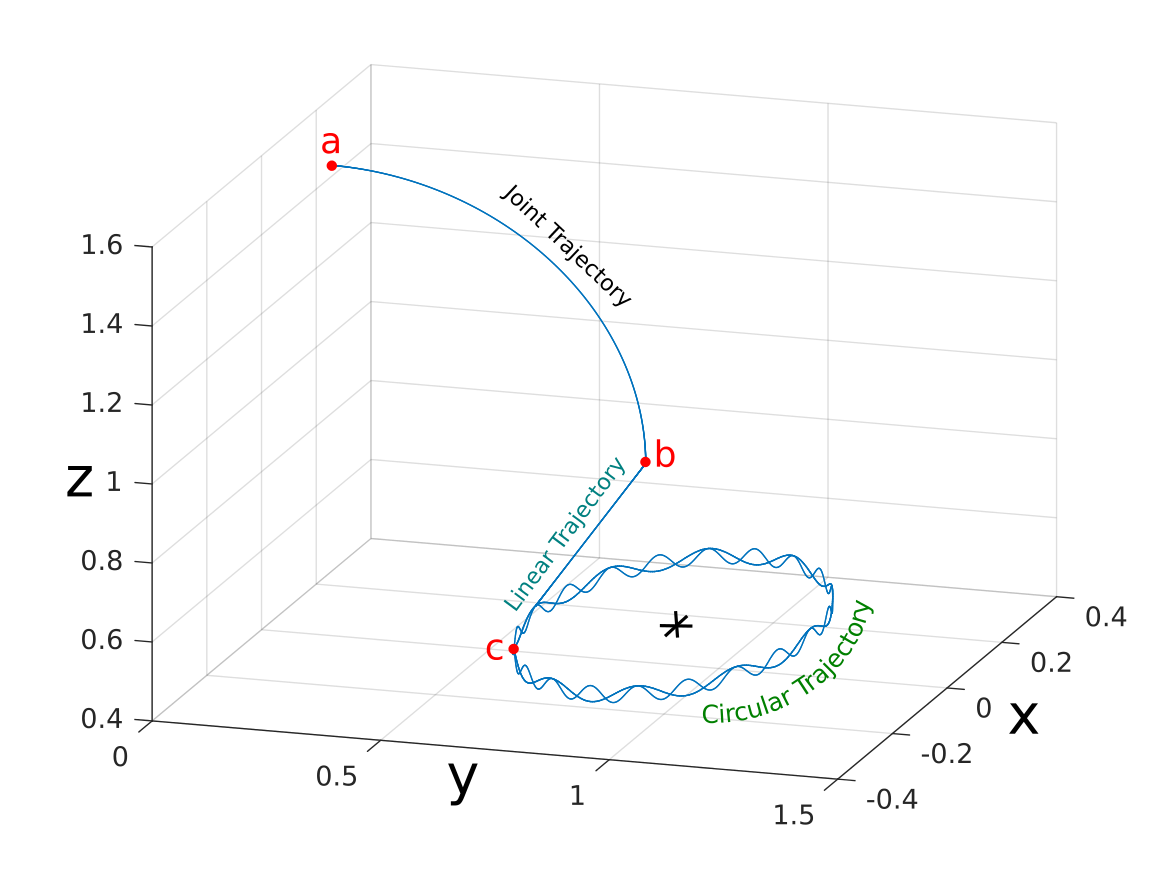
Robothon had two tasks. First task is self collision and second one is obstacle avoidance. The subtask for me was ‘Indentifing and avoiding self-collision from given joint and Cartesian trajectories’. The given task is validating joint configuration and end-effector’s homogeneous transformation from home position. I used MoveIt with RRT* from OMPL.
Joint Configuration(From Home poistion to target joints)
End-Effector pose(Linear movement from home to a target point)
Multi-sensory Based Robot Dynamic manipulation(MSBRDM)
MSBRDM giave more pratical tutorials by each section from homogeneous transform matrix(Rotation and Translation) to dynamics and control.
The first part is kinematics.
Using homogeneous transfrom, publish TF for UR10 from DH parameters(3 DoFs from 6 DoFs).
The second part is dynamics.
Formulate a dynamic equation from centor of Mass and lengths of links for each joint(3 DoFs).
Tau is zero for UR10
Leave a Comment
Your email address will not be published. Required fields are marked *