Walking
How to use Pinocchio library
First, we learned how to use pinocchio library for homogeneous transforms and control of robots(Humanoid).
How to handle TSID
Learn how to use Task Space Inverse Dynamics(TSID) for a posture of a humanoid robot.
Walking Model
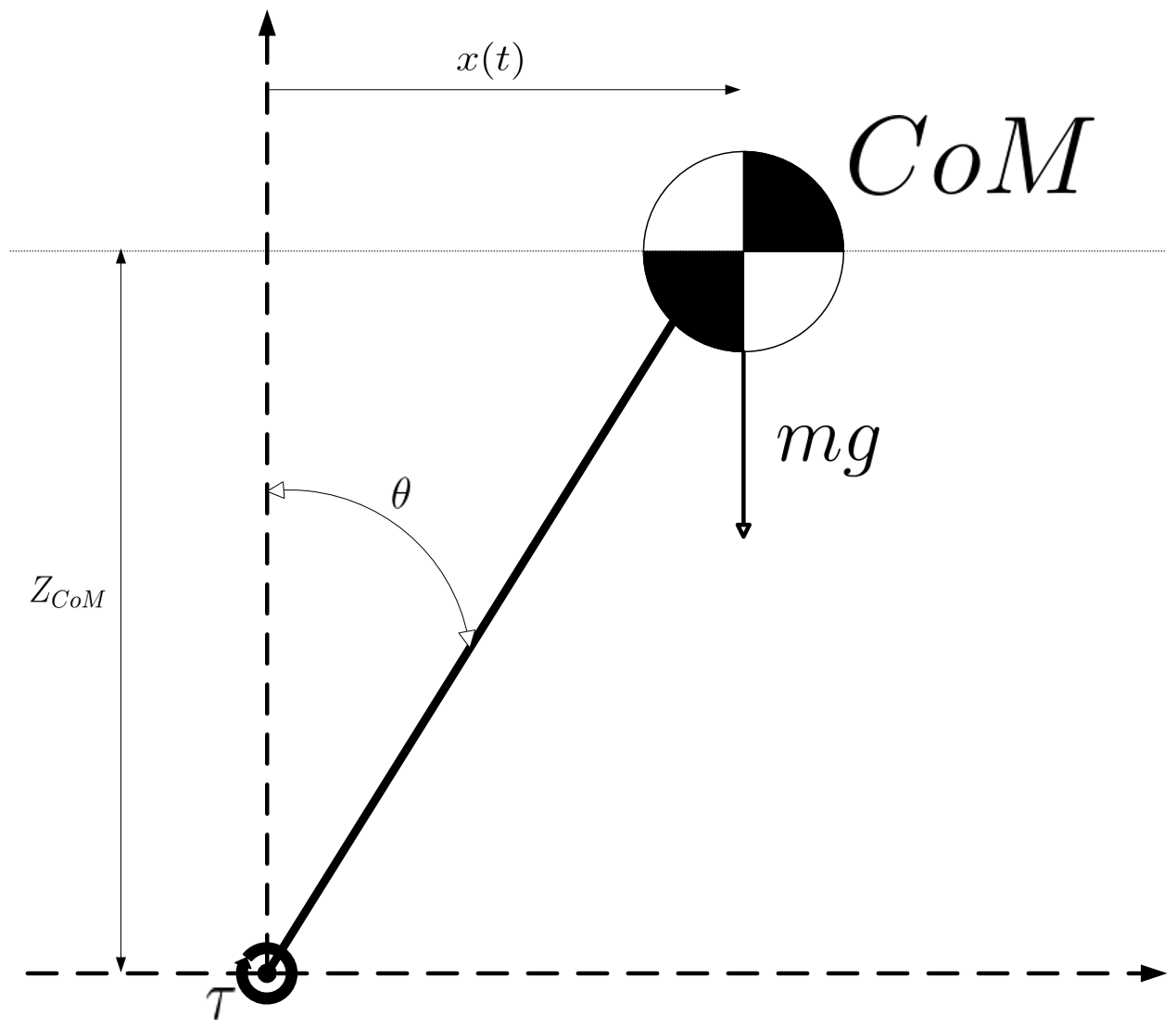
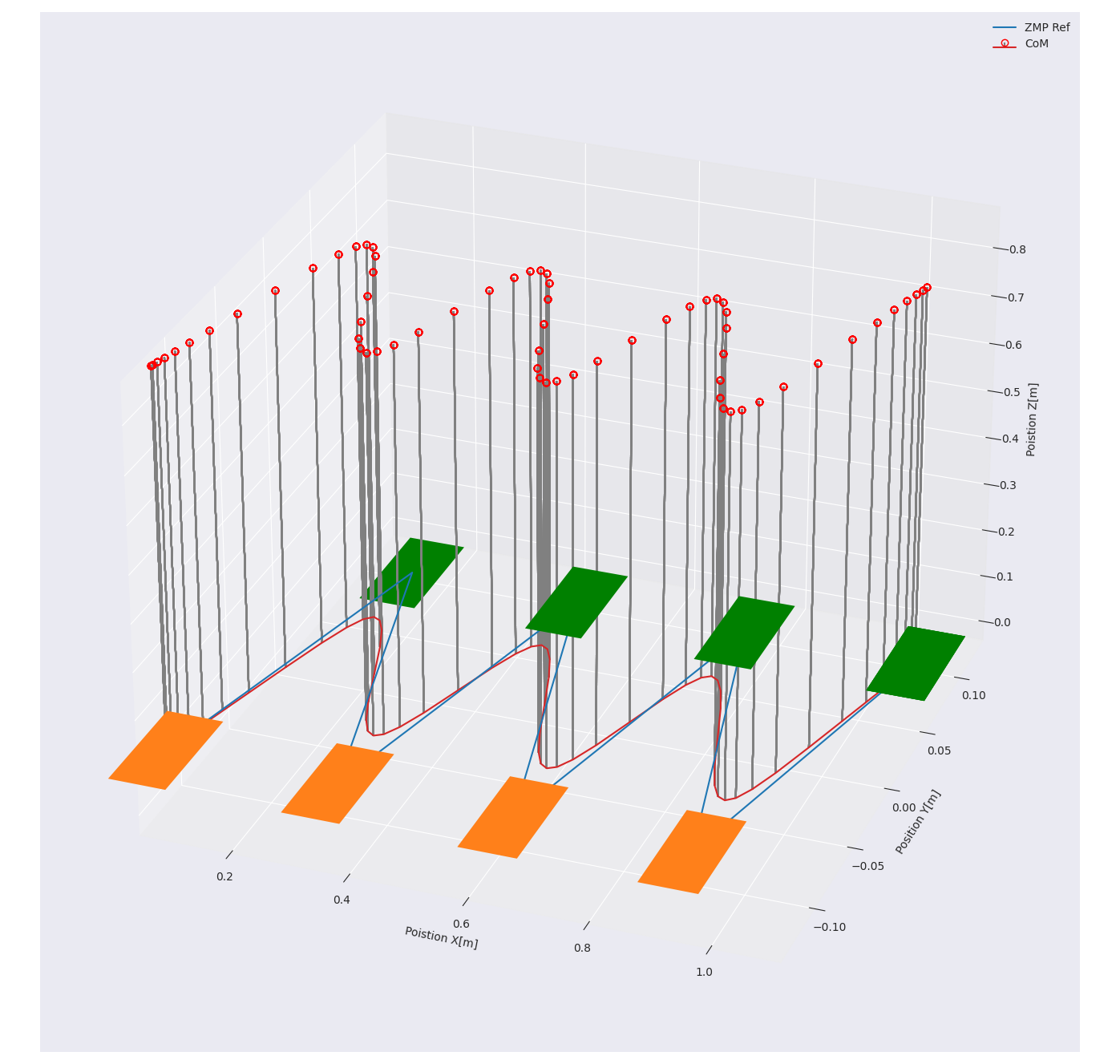
Learn linear inverted pendulum model(LIPM) for walking strategy.
Design MPC from given a tajectory for foot steps.
Walking video
Leave a Comment
Your email address will not be published. Required fields are marked *