Navigation
Navigation Stack
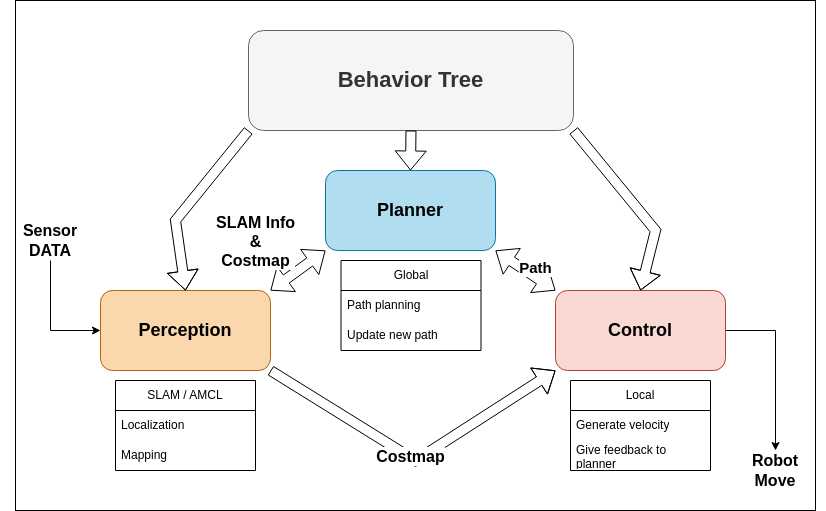
Concept of Nav 2
Implement Reachablable sets for montionb planning
Our team tried to implement a motion planning algorithm in navigation stack. Using Reachable Sets for Trajectory Planning of Automated Vehicles
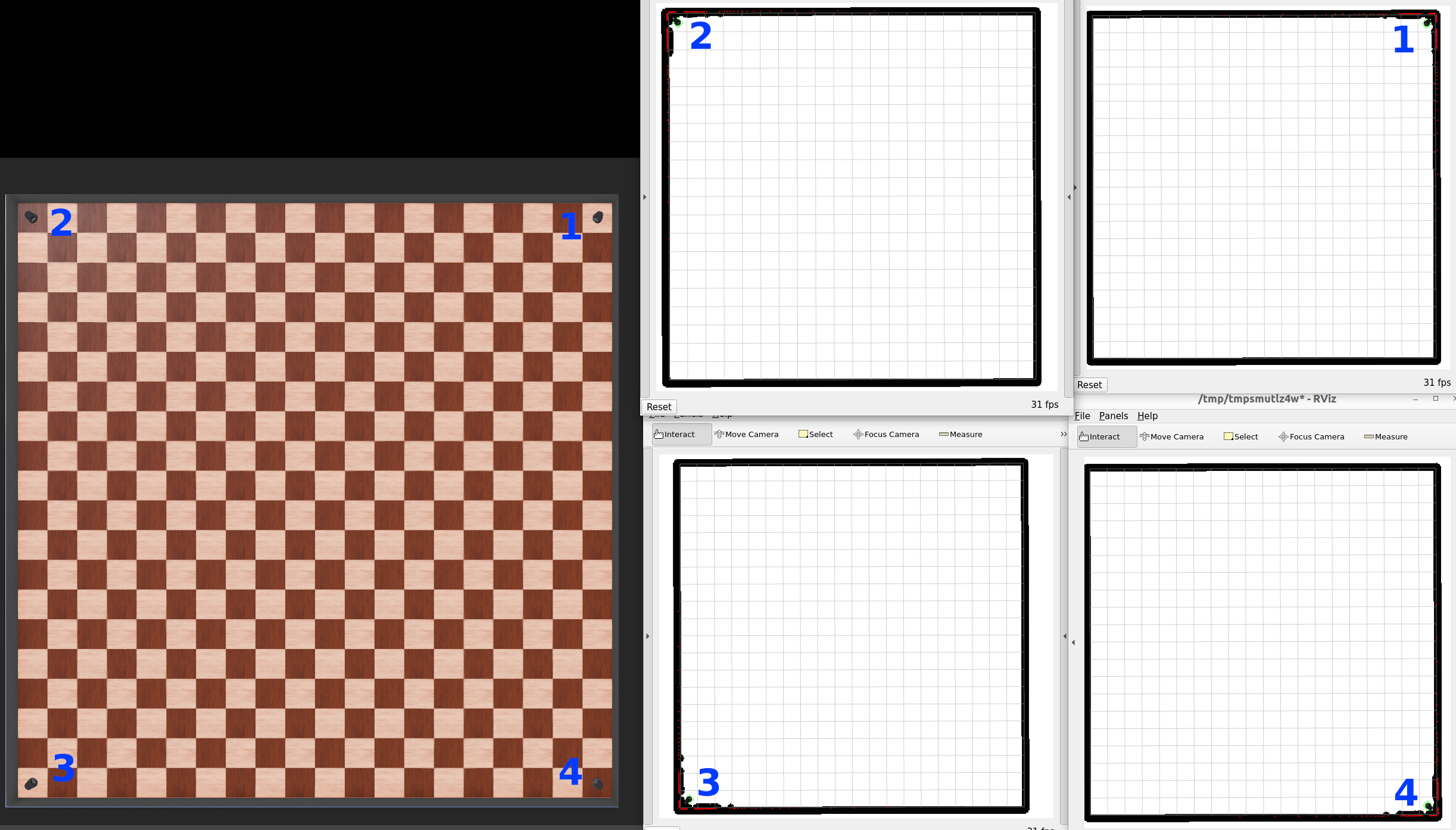
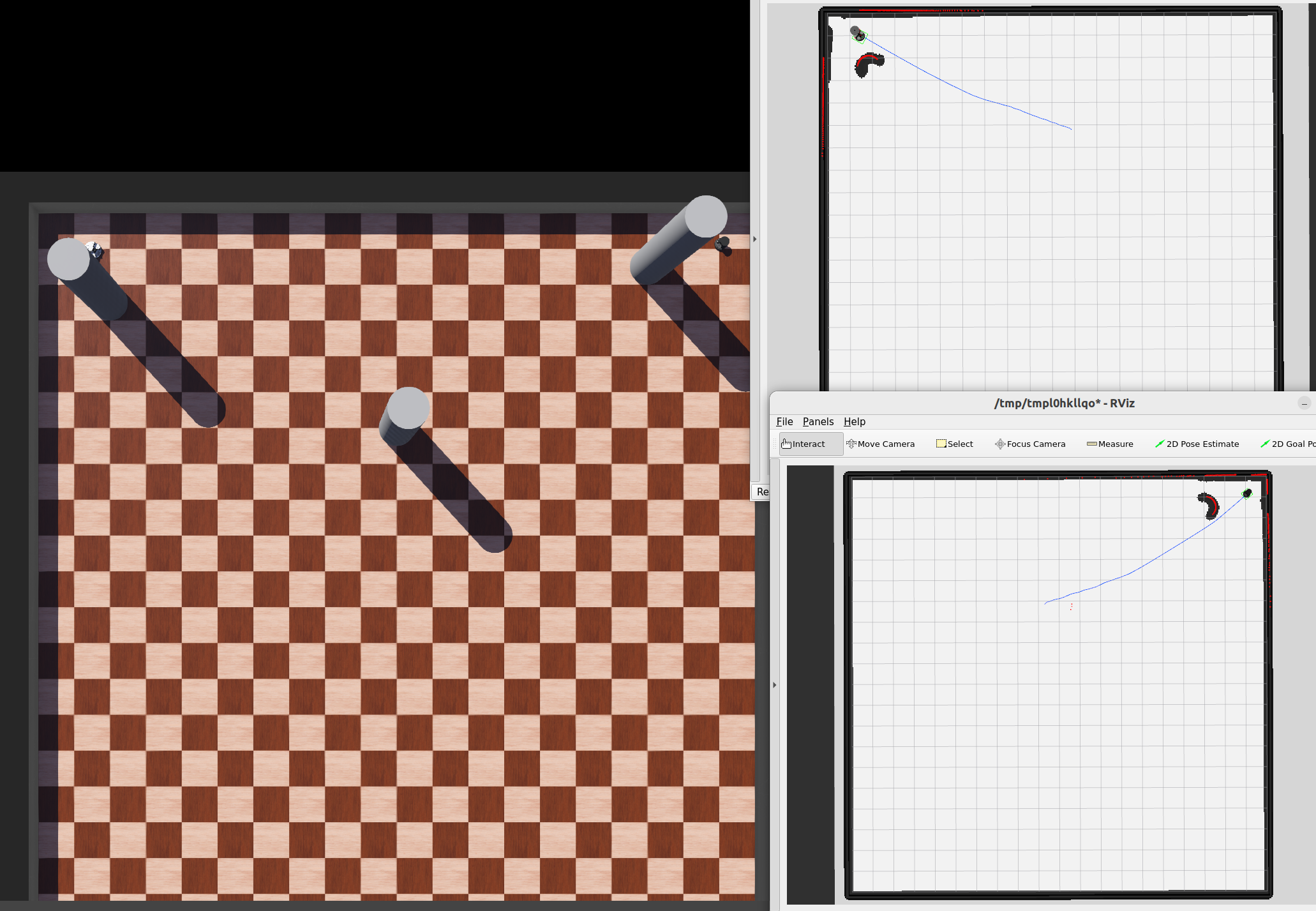
Final Result
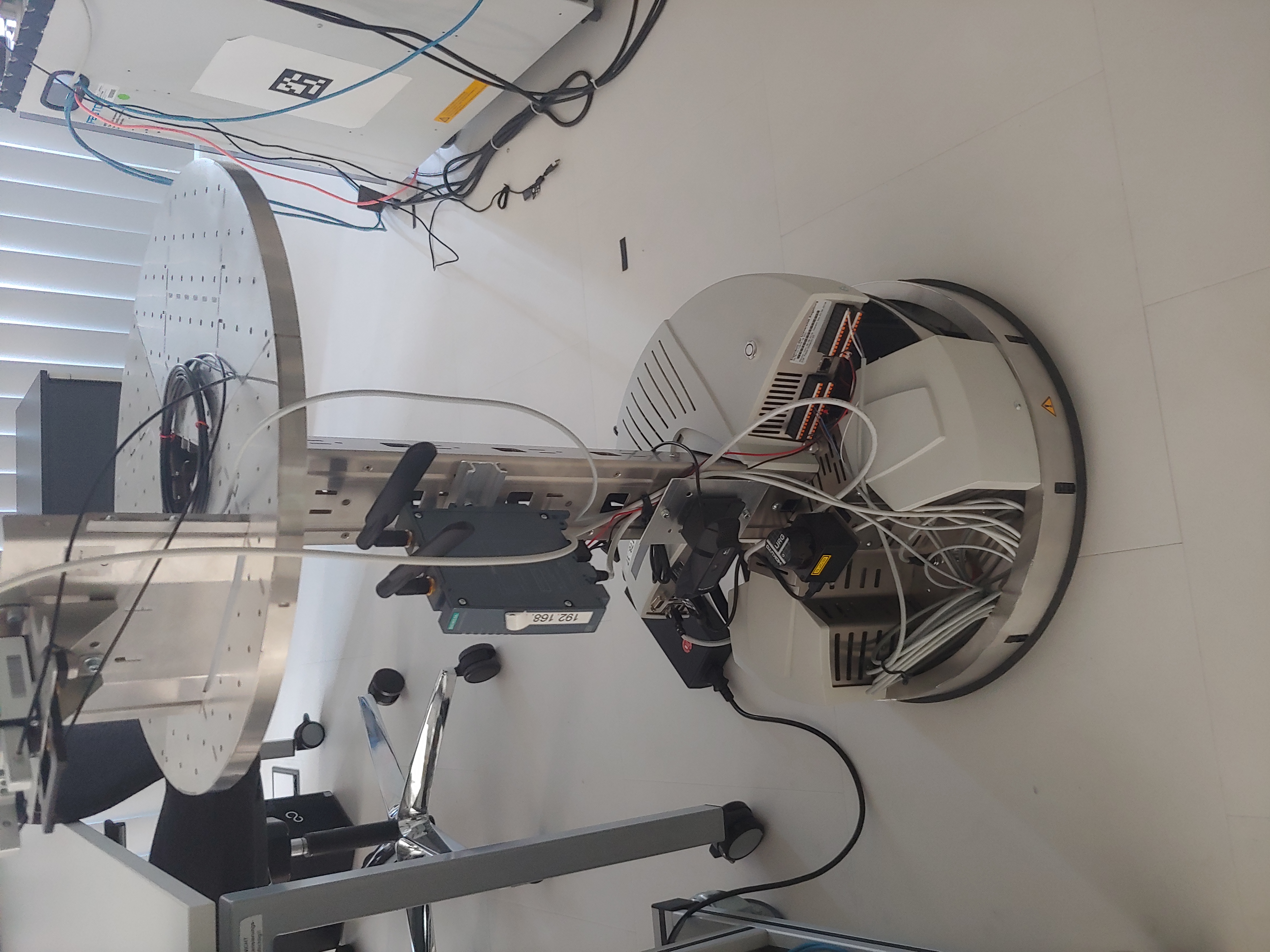
Multi-robots Navigation
From Fraunhofer IKS, I implemented Nav2 with Webot.

Leave a Comment
Your email address will not be published. Required fields are marked *