Grasping
Introction to Grasping
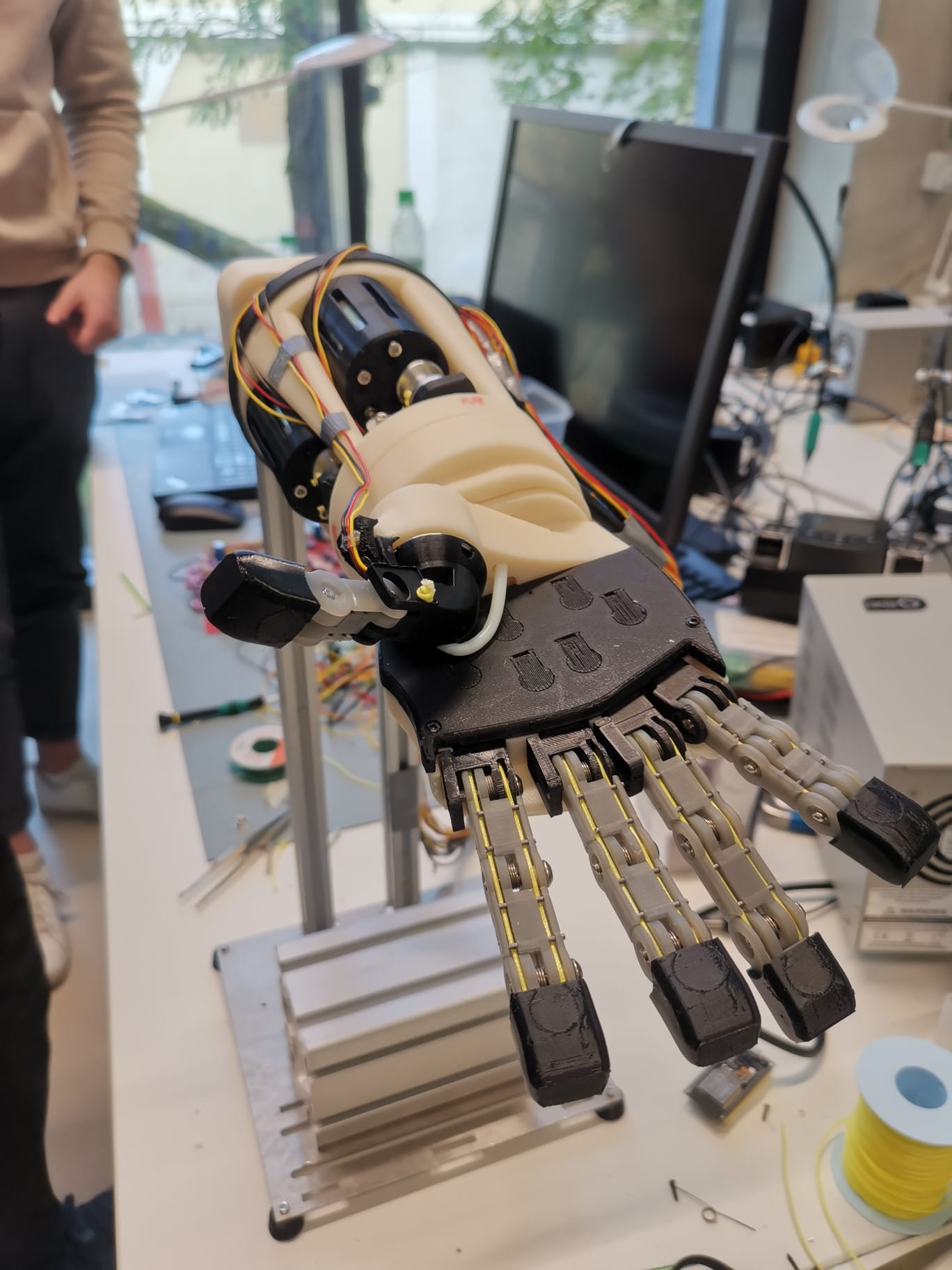
This course focused on a robotic hand, distinct from a gripper. The content covered topics ranging from degrees of freedom (DoF) to the kinematics of a robotic hand. The course project involved using glove inputs from a human hand to control a robotic hand in simulation.
Robotics Hackathon
We designed a robotic hand for Siemens. I worked on the software and simulation aspects, focusing on processing SenseGlove inputs. We utilized Unity in combination with ROS. To test our sensor inputs and outputs, I developed a simple game in the simulation.
Leave a Comment
Your email address will not be published. Required fields are marked *